在‘我為群眾辦實事’實踐活動中,藝朝藝夕黨群服務中心積極響應號召,立足基層需求,創新服務模式,將藝術文化機構的組織優勢轉化為服務效能,特別在近期大規模疫苗接種工作中,主動承擔起數據處理的關鍵支持角色,為筑牢社區免疫屏障貢獻了獨特力量。
隨著疫苗接種工作的全面鋪開,海量的預約登記、信息核對、劑次統計與反饋跟進數據亟待高效、準確處理。傳統手工操作不僅效率低下,且易出錯,可能影響接種進度與居民體驗。藝朝藝夕黨群服務中心敏銳洞察到這一痛點,迅速組建了一支由黨員骨干、青年志愿者及具備信息技術特長的藝術教師構成的專項服務隊。他們充分發揮機構在活動組織、人員協調與細節把控方面的專業經驗,將藝術教育中培養的耐心、細致與創造力融入數據處理工作。
服務隊首先與社區衛生服務中心、街道管理部門緊密對接,明確數據流轉的各個環節與標準化要求。通過引入簡易的電子化表格工具,并設計清晰的數據錄入與核對流程,他們將原本繁雜的紙質登記信息轉化為結構化數字檔案。志愿者們經過統一培訓,分批次、分時段駐點服務,負責信息的錄入、去重、分類與更新,確保每位居民的信息準確無誤,接種記錄完整可溯。
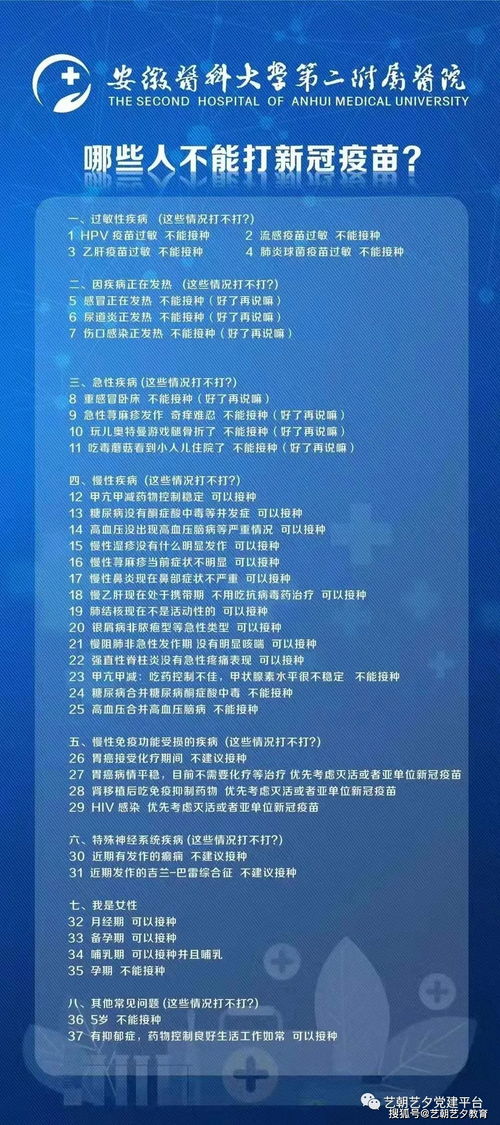
尤為值得一提的是,面對老年人、不熟悉智能手機操作的群體,服務隊特別設立了‘愛心數據通道’。黨員志愿者一對一協助他們完成線上預約或線下信息補錄,耐心解答疑問,并將他們的特殊需求(如行動不便需上門接種等)標注在數據系統中,推動后續服務精準對接。這種將冰冷的數據處理與溫暖的人文關懷相結合的方式,真正體現了‘辦實事’的初心。
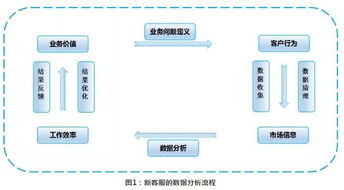
藝朝藝夕黨群服務中心還利用自身在社區中的聯絡優勢,通過藝術學員家庭網絡、社區宣傳欄及線上社群,及時發布接種點人流數據、苗量信息等動態處理結果,引導居民錯峰接種,有效緩解了接種點排隊壓力,提升了整體服務效率與秩序。數據處理團隊每日進行工作小結,不斷優化流程,形成了‘收集-處理-反饋-優化’的閉環,確保了數據支撐的實時性與有效性。
藝朝藝夕黨群服務中心的這項創新實踐表明,‘為群眾辦實事’可以滲透到公共服務的各個細微環節。通過將黨群組織的動員力、藝術機構的執行力與信息化手段相結合,他們不僅高效完成了疫苗接種的數據后勤保障,更在過程中強化了黨組織與群眾的血肉聯系,展現了新時代基層黨群服務的新風貌與新擔當。他們計劃將此次積累的數據處理與服務協調經驗模塊化、常態化,為應對其他社區公共事務提供可復制的支持模板,持續讓群眾感受到實事辦實的成效與溫暖。